SparkNavi Blue

SparkNavi Blue is a high-performance STM32H743 flight control computer designed for professional UAV, robotics, and research platforms.
Fully supported by the ArduPilot ecosystem and engineered for long-lifecycle deployment across industrial and research applications.
Widely deployed across industrial, research, and autonomous platform integrations.
Key Features
- CNC machined aluminum enclosure
- STM32H743 MCU (480MHz)
- 2MB Flash
- Dual IMU (ICM42652 + ICM42688)
- External I2C compass support (RM3100 / IST8310)
- CAN FD (2 ports)
- Dual GPS ports
- microSD logging
- Dedicated IOMCU
- Integrated RGB status LED
- USB Type-C
- Compact enclosed design
Manufacturing & Compliance
Designed and manufactured in Taiwan.
The hardware is built using globally sourced industrial-grade components suitable for customers with strict regulatory, compliance, or export requirements.
Regulatory Compliance
SparkNavi Blue has passed international EMC and safety compliance testing.
FCC (United States)
- 47 CFR FCC Part 15 Subpart B (Class B)
- ANSI C63.4:2014
CE (European Union)
- EN 55032:2015 + A11:2020
- EN 55035:2017 + A11:2020
- EN IEC 61000-3-2:2019 + A2:2024
- EN 61000-3-3:2013 + A2:2021 + AC:2022
PSE (Japan)
- J62368-1:2023
These certifications enable deployment across North America, Europe, and Japan.
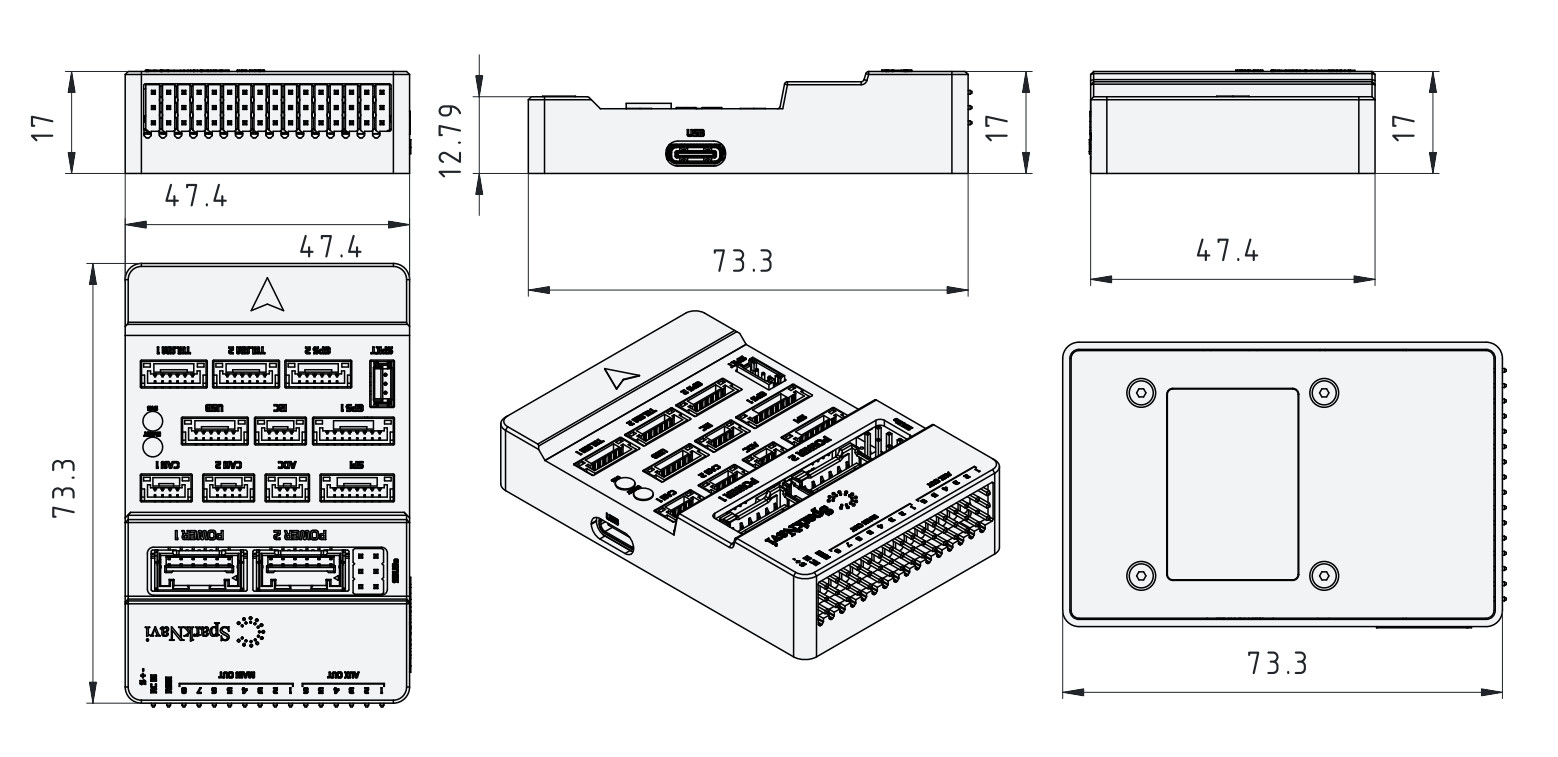
Size
Specifications
| Item | Specification |
|---|---|
| MCU | STM32H743 (480MHz) |
| IOMCU | STM32F103 |
| Flash | 2MB |
| IMU | ICM42652 + ICM42688 |
| Barometer | BMP280 |
| Internal Compass | HMC5883L |
| CAN | 2× CAN FD |
| UARTs | 6 |
| PWM Outputs | 14 (6 AUX + 8 MAIN via IOMCU) |
| Logging | microSD |
| USB | USB-C |
Main Connectors
- POWER1 / POWER2
- GPS1 / GPS2
- TELEM1 / TELEM2
- CAN1 / CAN2
- SPI expansion
- ADC expansion
- I2C external bus
- SBUS / RSSI port
UART Mapping
| Port | Function |
|---|---|
| USART1 | GPS1 |
| UART4 | GPS2 |
| USART2 | TELEM1 |
| USART3 | TELEM2 |
| UART7 | Debug |
| UART8 | IOMCU |
I2C Buses
| Bus | Usage |
|---|---|
| I2C2 | External I2C |
| I2C4 | Internal sensors |
External compasses are automatically detected on the external I2C bus.
Connector Overview
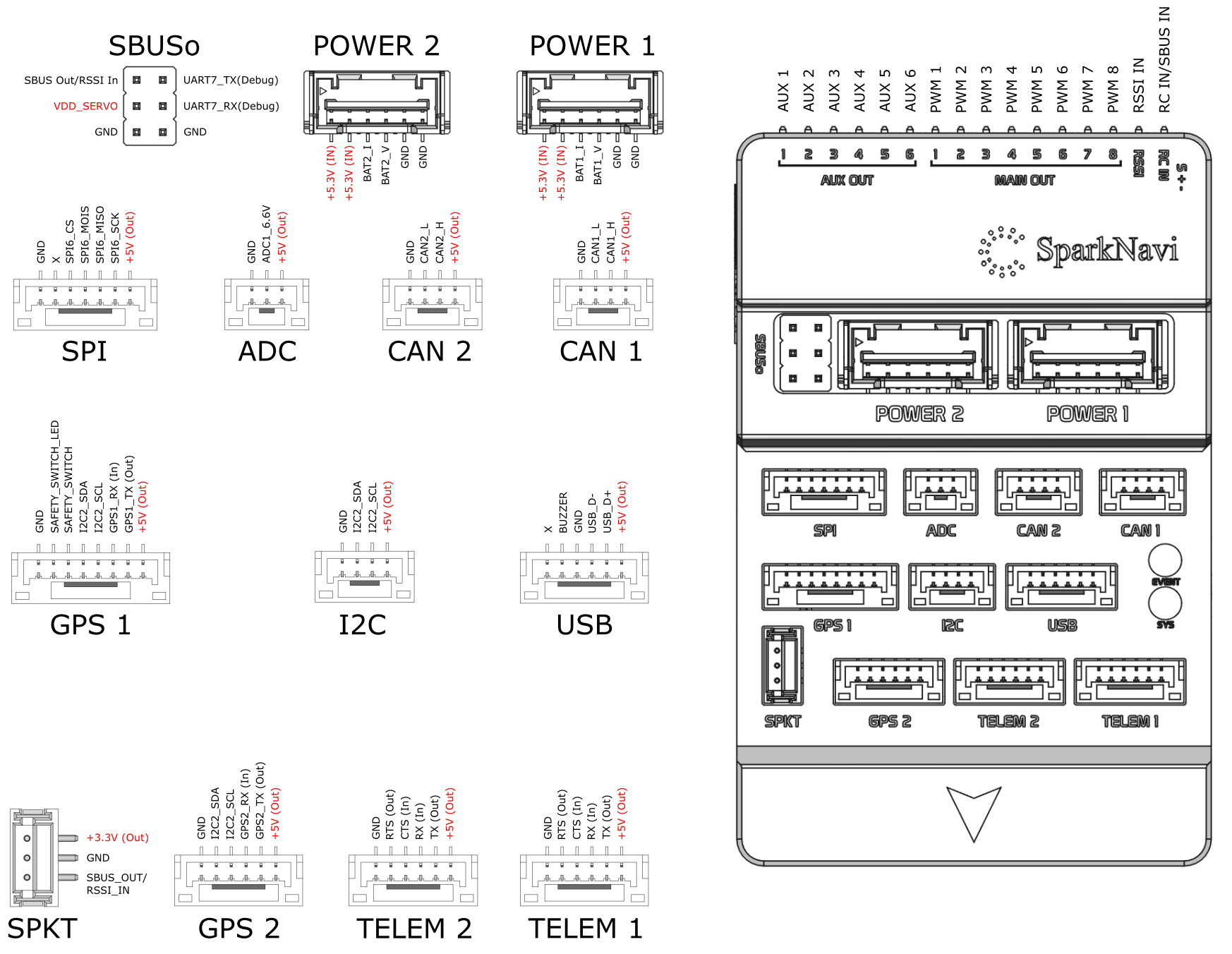
Connector Pin Definitions
TELEM1 / TELEM2 (Telemetry UART)
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | TX | Output | UART transmit |
| 3 | RX | Input | UART receive |
| 4 | CTS | Input | Flow control (optional) |
| 5 | RTS | Output | Flow control (optional) |
| 6 | GND | — | Ground |
GPS1
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | GPS1_TX | Output | UART TX to GPS |
| 3 | GPS1_RX | Input | UART RX from GPS |
| 4 | I2C2_SCL | Output | Compass I2C clock |
| 5 | I2C2_SDA | Bi-Dir | Compass I2C data |
| 6 | SAFETY_SWITCH | Input | Safety button |
| 7 | SAFETY_SWITCH_LED | Output | Safety switch / LED |
| 8 | GND | — | Ground |
GPS2
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | GPS2_TX | Output | UART TX to GPS |
| 3 | GPS2_RX | Input | UART RX from GPS |
| 4 | I2C2_SCL | Output | Secondary I2C clock |
| 5 | I2C2_SDA | Bi-Dir | Secondary I2C data |
| 6 | GND | — | Ground |
CAN1 / CAN2
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | CAN_H | Bi-Dir | CAN high |
| 3 | CAN_L | Bi-Dir | CAN low |
| 4 | GND | — | Ground |
USB Port
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | USB_D+ | Bi-Dir | USB data positive |
| 3 | USB_D- | Bi-Dir | USB data negative |
| 4 | GND | — | Ground |
| 5 | Buzzer | Output | External buzzer output |
| 6 | x | — | x |
This USB port allows connection of an external safety buzzer and USB interface for firmware upload and MAVLink communication.
I2C External Port
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | I2C2_SCL | Output | I2C clock |
| 3 | I2C2_SDA | Bi-Dir | I2C data |
| 4 | GND | — | Ground |
ADC Port
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | ADC | Input | Analog input |
| 3 | GND | — | Ground |
SPI Expansion Port
| Pin | Signal | Direction | Description |
|---|---|---|---|
| 1 | +5V | Output | 5V peripheral power |
| 2 | SPI6_SCK | Output | SPI clock |
| 3 | SPI6_MISO | Input | SPI MISO |
| 4 | SPI6_MOSI | Output | SPI MOSI |
| 5 | SPI6_CS | Output | Chip select |
| 6 | x | — | x |
| 7 | GND | — | Ground |
SBUS / RSSI Port (SPKT)
| Pin | Signal |
|---|---|
| 1 | +3.3V |
| 2 | GND |
| 3 | SBUS_OUT / RSSI_IN |
POWER1 / POWER2
| Pin | Signal |
|---|---|
| 1 | +5.3V (IN) |
| 2 | +5.3V (IN) |
| 3 | BAT1_I |
| 4 | BAT1_V |
| 5 | GND |
| 6 | GND |
Output Architecture
SparkNavi Blue uses a dual-processor architecture:
- MAIN outputs are driven by the IOMCU (failsafe capable)
- AUX outputs are driven directly by the FMU (high-speed / flexible)
This architecture provides redundancy and improved flight safety.
MAIN Outputs (IOMCU Controlled)
Primary motor outputs with hardware failsafe support.
| Output | Function | Notes |
|---|---|---|
| MAIN OUT 1 | Motor / Servo | IOMCU controlled |
| MAIN OUT 2 | Motor / Servo | IOMCU controlled |
| MAIN OUT 3 | Motor / Servo | IOMCU controlled |
| MAIN OUT 4 | Motor / Servo | IOMCU controlled |
| MAIN OUT 5 | Motor / Servo | IOMCU controlled |
| MAIN OUT 6 | Motor / Servo | IOMCU controlled |
| MAIN OUT 7 | Motor / Servo | IOMCU controlled |
| MAIN OUT 8 | Motor / Servo | IOMCU controlled |
✔ Hardware failsafe supported
✔ Recommended for motors / critical actuators
AUX Outputs (FMU Controlled)
Flexible outputs for payloads and advanced peripherals.
| Output | Typical Use |
|---|---|
| AUX OUT 1 | Gimbal / Payload |
| AUX OUT 2 | Gimbal / Payload |
| AUX OUT 3 | Landing gear |
| AUX OUT 4 | Camera trigger |
| AUX OUT 5 | Lights / Buzzer |
| AUX OUT 6 | Custom peripherals |
✔ High update rate supported
✔ Fully configurable in ArduPilot
PWM Summary
MAIN outputs are driven by the IOMCU.
AUX outputs are driven by the FMU.
| Outputs | Pins |
|---|---|
| MAIN OUT | 1–8 |
| AUX OUT | 1–6 |
| Total | 14 PWM Outputs |
RC Input
The SBUS connector supports:
- SBUS input
- SBUS output
- RSSI input
Powering the Board
The controller can be powered from either POWER1 or POWER2.
Both provide:
- Power input
- Voltage/current sensing
- Redundant supply capability
Compass
External compasses are recommended for optimal flight performance.
Supported models:
- RM3100
- IST8310
Automatic compass rotation detection is enabled.
Firmware Support
Fully supported in the official ArduPilot firmware distribution.
Board Name: SparkNavi Blue
APJ Board ID: 1362
Supported Firmware
- ArduPilot (Official Support)
Typical Wiring
Typical wiring includes:
- GPS on GPS1
- Telemetry radio on TELEM1
- External compass on I2C
- ESCs on MAIN outputs
Typical Applications
- Industrial UAV platforms
- VTOL and multirotor systems
- Autonomous robotics
- Research and development platforms
Electrical Specifications
| Parameter | Value |
|---|---|
| Operating Voltage | 4.8V – 6.0V |
| Recommended Power Module | 5.3V regulated supply |
| Typical Power Consumption | 0.98W |
| Logic Level | 3.3V |
| GPS Power Output | 5V |
| Peripheral Power Output | 5V |
Power is supplied via POWER1 or POWER2 modules with redundant capability.
Power consumption may vary depending on connected peripherals.
Environmental
| Parameter | Value |
|---|---|
| Operating Temperature | -20°C to +70°C |
| Storage Temperature | -40°C to +85°C |
Mechanical Specifications
| Parameter | Value |
|---|---|
| Length | 73.3 mm |
| Width | 47.4 mm |
| Height | 17 mm |
| Weight | 70 g |
Manufacturer
SparkNavi
Designed & Manufactured in Taiwan
Downloads
For integration support or volume orders, please contact us.
Engineering and compliance documents are available below.