対気速度センサー設定¶
対気速度センサーは固定翼機(Plane / VTOL)の飛行に不可欠です。SparkNavi Blue は アナログ対気速度センサー と デジタル(I2C)対気速度センサー の両方をサポートします。
アナログ対気速度センサー設定¶
配線¶
アナログ対気速度センサーを SparkNavi Blue の ADC コネクタ に接続:
| Pin | 信号 | 対気速度センサー |
|---|---|---|
| 1 | +5V | VCC |
| 2 | ADC | OUT(アナログ信号) |
| 3 | GND | GND |

コネクタの「ANA」ラベルがアナログ信号出力ピンで、フライトコントローラーの ADC 入力に接続されます。
ArduPilot パラメータ¶
| パラメータ | 値 | 説明 |
|---|---|---|
ARSPD_TYPE |
2 (Analog) |
アナログタイプ |
ARSPD_PIN |
18 |
SparkNavi Blue 専用アナログピン |
ARSPD_USE |
1 |
制御に対気速度を使用 |
⚠️ ARSPD_PIN = 18 の由来:STM32H743 上の PA4(ADC1_6V6_IN)、すなわち ADC1 の PIN 18 に対応します。これは SparkNavi Blue の hwdef で定義されています。Mission Planner のドロップダウンに 18 が表示されない場合は、手動入力してください。
校正¶
- 上記パラメータを設定
- フライトコントローラーを再起動
- ピトー管の Dynamic 孔に軽く息を吹きかけ、Mission Planner HUD の AS(Airspeed)値が変化すれば設定成功
デジタル対気速度センサー設定(MS5525)¶
配線¶
MS5525 デジタル対気速度センサーを SparkNavi Blue の I2C 外部ポート に接続:
| Pin | 信号 |
|---|---|
| 1 | +5V |
| 2 | I2C2_SCL |
| 3 | I2C2_SDA |
| 4 | GND |
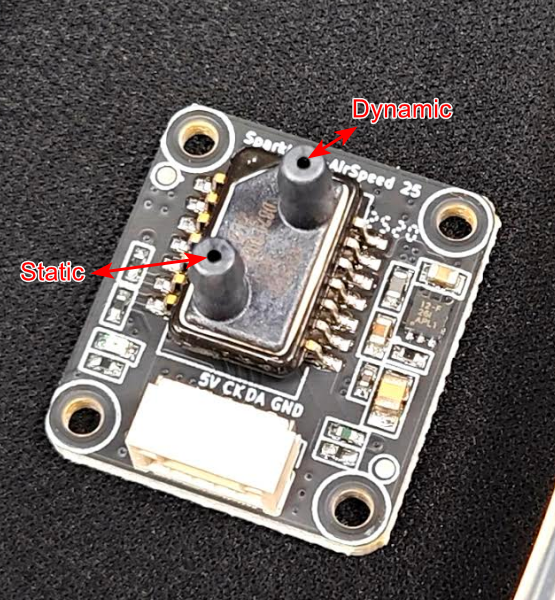
ピトー配管¶
下図のように、Static(静圧)はピトー管の側孔、Dynamic(動圧)はピトー管の前端孔に接続:
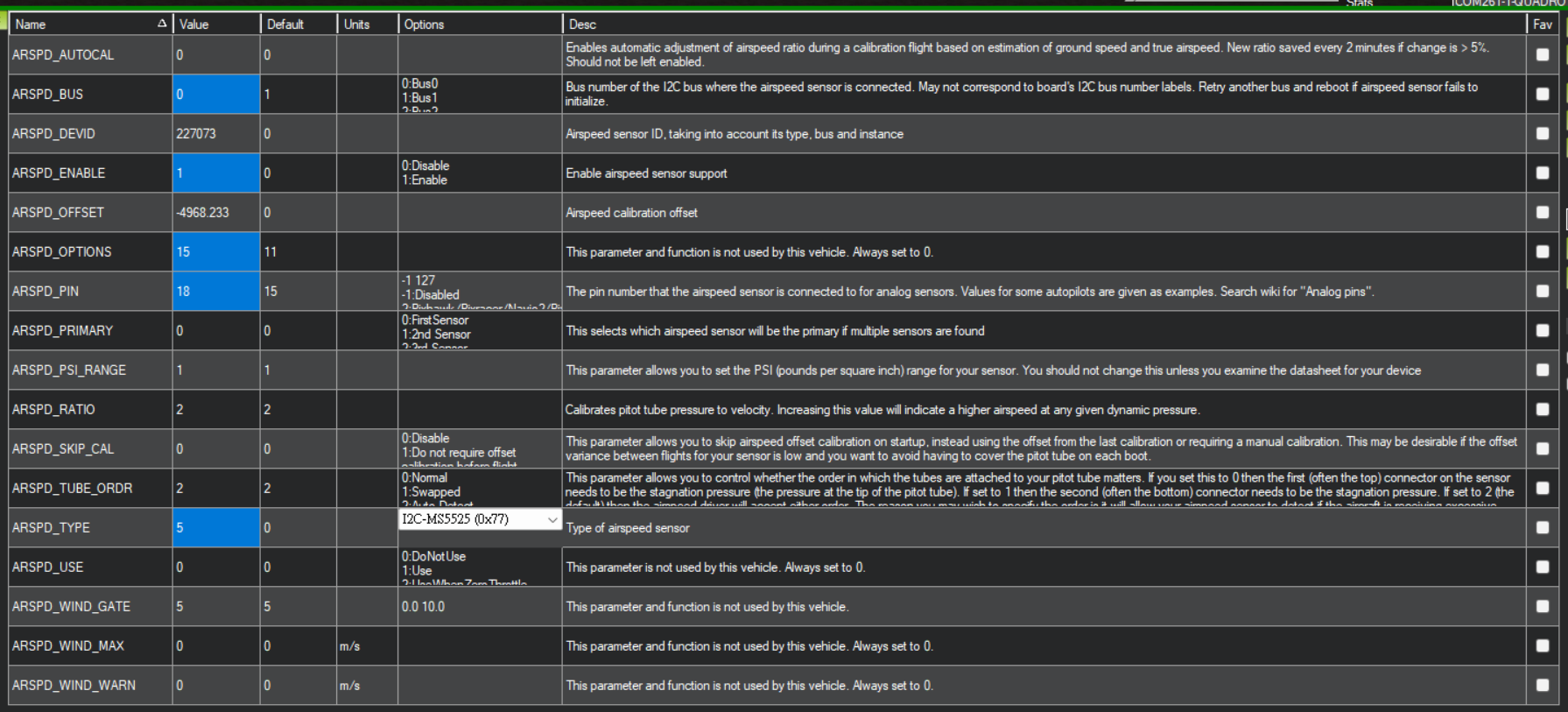
ArduPilot パラメータ¶
ARSPD_BUS = 0
ARSPD_OPTIONS = 15
ARSPD_PIN = 18
ARSPD_TYPE = 5 (I2C-MS5525, 0x77)
完全パラメータ表:
なぜ ARSPD_BUS = 0 ?¶
SparkNavi Blue の hwdef 設計では I2C2 がバス 0 にマッピング されています(外部 I2C 周辺機器の優先度が高いため)。したがって ARSPD_BUS = 0 は物理的な I2C2 外部ポートに対応します — 0 番は文字通りのバス 0 を意味するわけではありません。
I2C アドレス衝突注意¶
- SPL06 気圧計の I2C アドレスは 0x76
- MS5525 のデフォルト I2C アドレスも 0x76 → SPL06 と衝突
- MS5525 を 0x77 に変更 して衝突を回避
- 他のフライトコントローラー(SPL06 なし)であれば MS5525 の 0x76 で問題なし
デジタル対気速度センサー校正手順¶
パラメータ設定後、校正を実施:
1. 既存の校正値をクリア¶
ARSPD_SKIP_CAL = 0 ← 一時的にスキップ校正を無効化
ARSPD_OFFSET = 0 ← 既存オフセットをクリア
Write Params をクリック。
2. 校正実施¶
- ピトー管の開口部を覆う(空気が入らないように)
- SparkNavi Blue を 再起動
- Mission Planner HUD で AS が 0 m/s と表示されるはず
3. 確認¶
パラメータページで ARSPD_OFFSET に自動的に非ゼロ値が入っていれば校正成功。
4. 校正をロック¶
ARSPD_SKIP_CAL = 1 ← スキップ校正を有効化、以降は今回の校正値を使用
HUD 表示確認¶
校正完了後、Mission Planner HUD 左上に AS(Airspeed)のリアルタイム値が表示されるはずです:

ピトー管の Dynamic 孔に息を吹きかけると、AS 値が即座に変化します(例:12.5 m/s)。
FAQ¶
Q: 設定後 AS がずっと 0 のまま?
A: 確認事項:
1. ARSPD_USE = 1 が有効か
2. I2C 配線が正しいか
3. ピトー管の Static / Dynamic 配管が逆になっていないか
4. デジタルセンサーの I2C アドレスが他モジュールと衝突していないか(0x77 に変更)
Q: なぜ再起動後 ARSPD_OFFSET が自動入力されない?
A: 校正の手順は 「先に風流を遮断 → 次に再起動」 の順序が必須です。順序が逆だと校正は失敗します。
Q: AS と GS(対地速度)が大きく違う?
A: 風の影響です。AS は空気に対する速度を測定、GS は地面に対する速度を測定します。向かい風では AS > GS、追い風では AS < GS。これは正常な現象です。