VL53L1X 距離センサー設定¶
VL53L1X は STMicroelectronics の I2C インターフェース ToF(Time-of-Flight)レーザー距離計モジュール で、有効測距 4 メートル。低高度着陸補助によく使用されます。
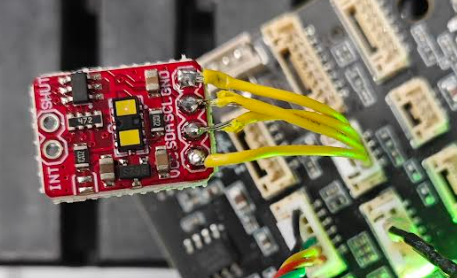
ハードウェア配線¶
VL53L1 モジュールを SparkNavi Blue の I2C 外部ポート に接続:
| Pin | 信号 | VL53L1X |
|---|---|---|
| 1 | +5V | VCC |
| 2 | I2C2_SCL | SCL |
| 3 | I2C2_SDA | SDA |
| 4 | GND | GND |
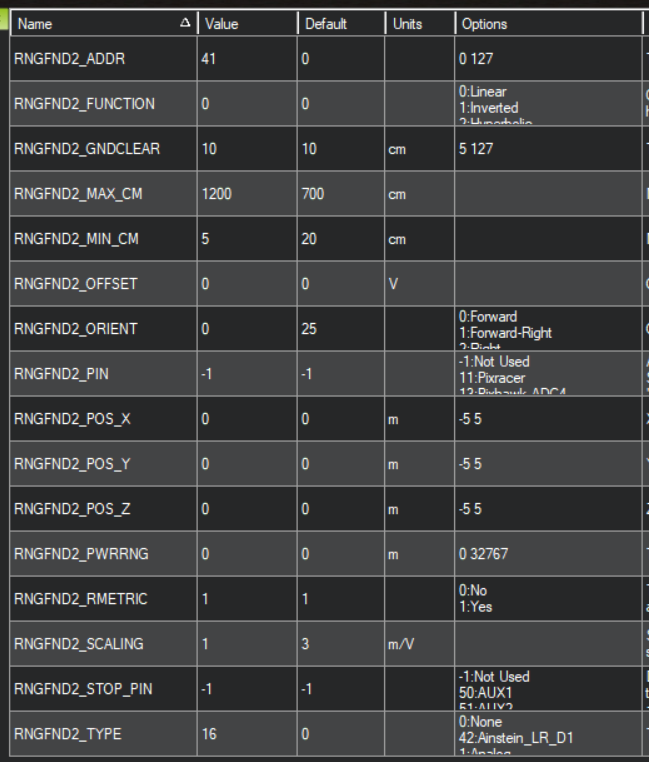
ArduPilot パラメータ¶
Mission Planner Config → Full Parameter List で:
| パラメータ | 値 | 説明 |
|---|---|---|
RNGFND2_TYPE |
16 (VL53L1X) |
距離センサータイプ |
RNGFND2_ADDR |
41 |
I2C アドレス(0x29 = 41、VL53L1X デフォルト) |
RNGFND2_MIN_CM |
5 |
最小有効距離 |
RNGFND2_MAX_CM |
1200 |
最大有効距離 |
RNGFND2_ORIENT |
25 (Downward) |
下向き |
RNGFND2_GNDCLEAR |
10 |
取り付け地上高(cm) |
なぜ RNGFND1 ではなく RNGFND2 なのか¶
すでに MTF-01 オプティカルフロー を主要距離計(RNGFND1)として使用している場合、VL53L1X は 二次距離計(RNGFND2)として、精密着陸や冗長設計に使用できます。
オプティカルフローを使わず VL53L1X のみを使用する場合は、RNGFND1_TYPE = 16 に設定してください。
検証¶
再起動後、Mission Planner Status ページで sonarrange2(または RNGFND 番号により sonarrange)がリアルタイムで表示されるはずです。
モジュールを近距離(5 cm)から遠距離(1 メートル以上)へ移動すると、値が対応して変化するはずです。