STORM32 ジンバル設定¶
STORM32BGC は人気のオープンソース三軸ジンバルコントローラーです。本ガイドでは SparkNavi Blue との配線および ArduPilot パラメータ設定を扱います。
ハードウェア仕様と電源¶
- 電圧:STORM32 メインボードの入力電圧範囲は 10V〜16.8V、3S Li-Po バッテリー を推奨します(4S も 16.8V 満充電まで対応)
- 電流:0.5A(ジンバル制御基板のみ、モーターは別)
- GUI ソフトウェア:STORM32 BGC Tool v0.90(古いが安定したバージョン)
⚠️ チューニングには v0.90 GUI を使用してください。新しい GUI は古い STORM32 ファームウェアとの互換性に問題があります。
配線対応表¶
| ジンバル軸 | SparkNavi Blue ピン | ArduPilot パラメータ | RC チャンネル |
|---|---|---|---|
| PITCH | AUX1 | SERVO9_FUNCTION |
RCIN9 |
| ROLL | AUX2 | SERVO10_FUNCTION |
RCIN10 |
| YAW | AUX3 | SERVO11_FUNCTION |
RCIN11 |
| ロック / フォロー | AUX4 | SERVO12_FUNCTION |
RCIN6 |
ロックモードは yaw 軸を特定の方向(例:正面)に固定する機能です。有効にすると 機体がどう回転してもカメラはその方向を維持 します。大部分の通常の用途ではロックモードを使用します。
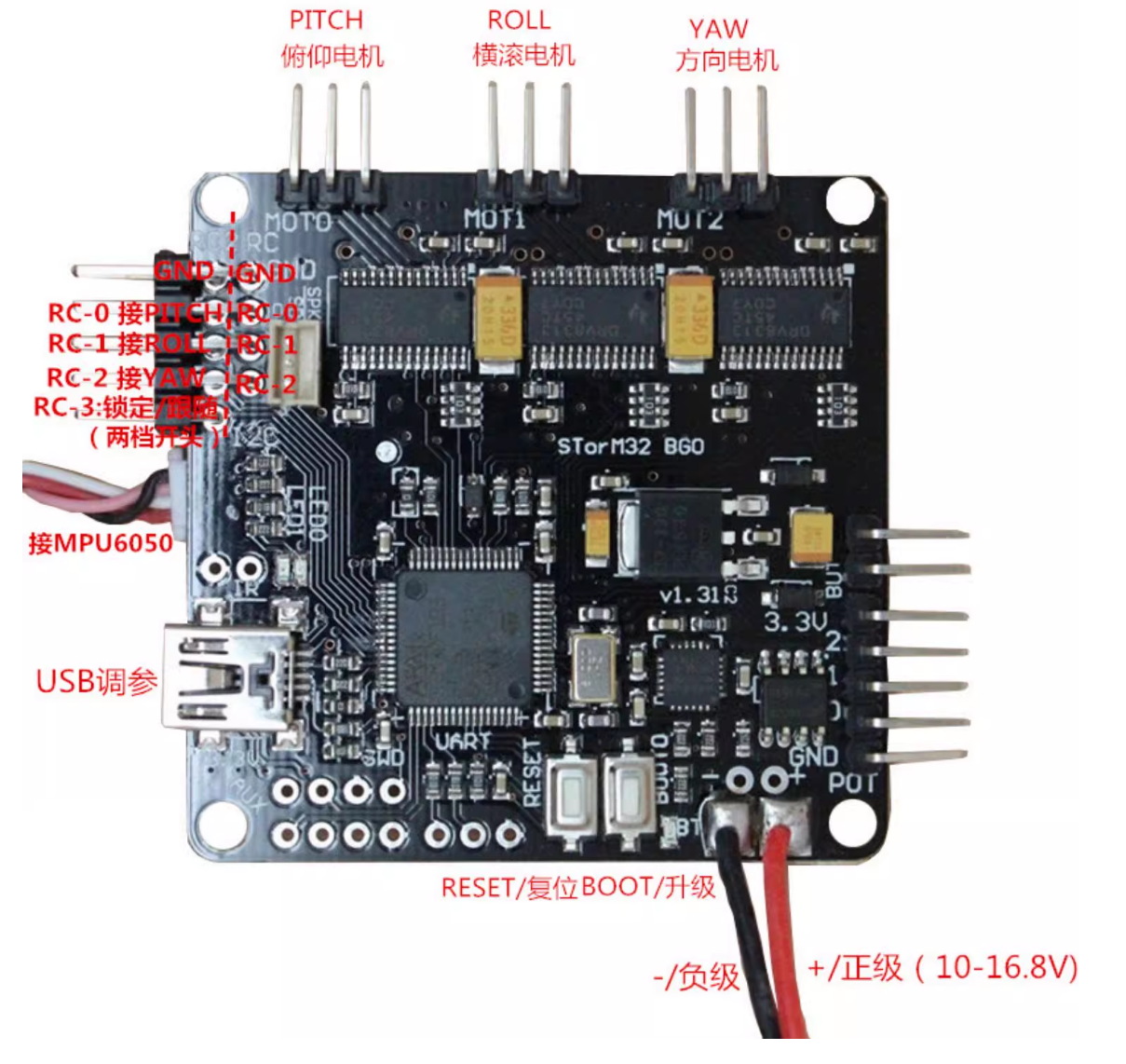
STORM32 ボード配線参考¶
下図は STORM32 BGC 基板のピン配置です。RC-0 / RC-1 / RC-2 が PITCH / ROLL / YAW 信号を受信。USB はチューニング用。
STORM32 GUI チューニング¶
STORM32 BGC を mini USB でコンピュータに接続し、STORM32 BGC Tool v0.90 を起動:
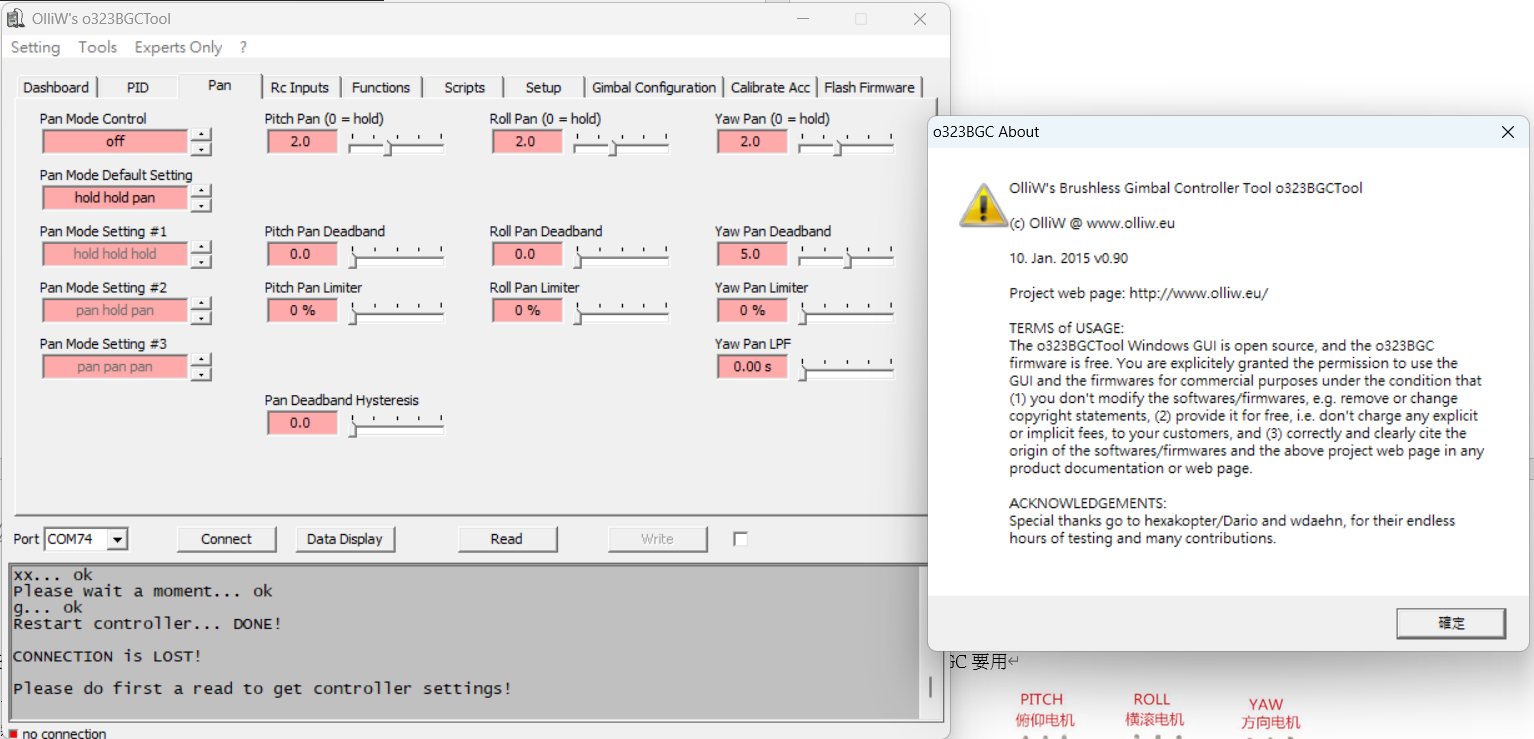
PID(安定制御)タブと Pan(自動追従)タブのパラメータを調整します。チューニング値はジンバル機種により異なります。PID をハードにするほどジンバルの耐風性は向上しますが、モーターの発熱速度も急激に上がります。
ArduPilot 側設定¶
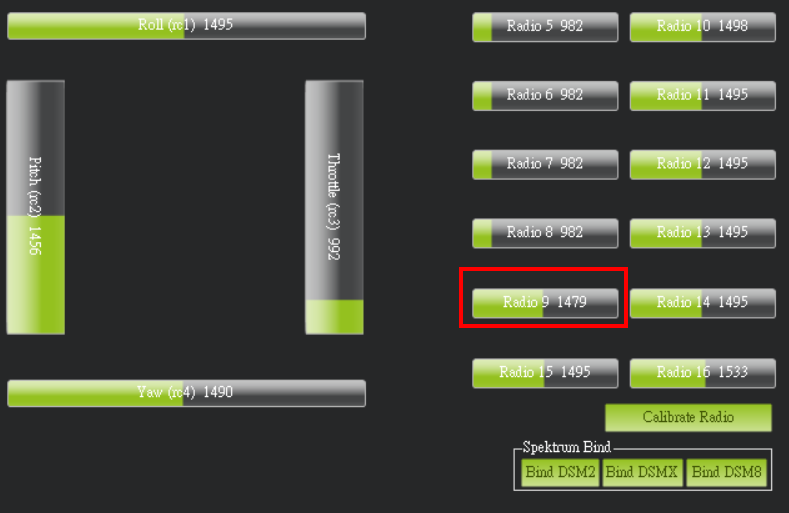
1. RC チャンネルの確認¶
Mission Planner Setup → Mandatory Hardware → Radio Calibration で、Radio 9 / 10 / 11 が送信機ノブに反応することを確認:
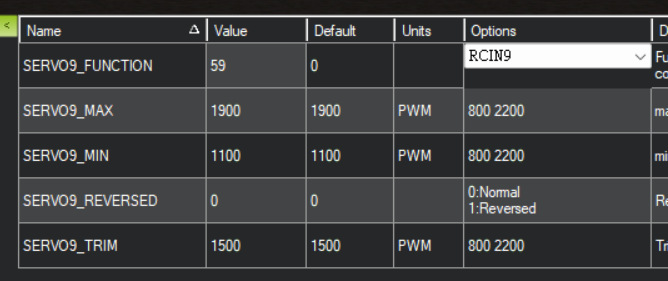
2. SERVO 関数を設定¶
Config → Full Parameter List で:
| パラメータ | 値 | 説明 |
|---|---|---|
SERVO9_FUNCTION |
59 (RCIN9) |
PITCH を RC 9 から直通 |
SERVO10_FUNCTION |
60 (RCIN10) |
ROLL を RC 10 から直通 |
SERVO11_FUNCTION |
61 (RCIN11) |
YAW を RC 11 から直通 |
SERVO12_FUNCTION |
56 (RCIN6) |
ロック / フォロー切替を RC 6 から制御 |
PWM 範囲も調整可能:
| パラメータ | デフォルト | 説明 |
|---|---|---|
SERVO9_MIN |
1100 |
最小 PWM |
SERVO9_MAX |
1900 |
最大 PWM |
SERVO9_TRIM |
1500 |
PWM 中央値 |
SERVO9_REVERSED |
0 または 1 |
反転 |
SERVO10–SERVO12 も同様の方法で設定。
ロックモードの使用¶
設定完了後、送信機の RC6 に対応するスイッチ(通常 2 ポジションスイッチ)を切り替え:
- OFF:フォローモード — ジンバルが機体姿勢に追従
- ON:ロックモード — ジンバル YAW がその時点の方向にロックされ、機体が回転してもカメラは固定