SparkNavi Blue¶

SparkNavi Blue 是一款搭載 STM32H743 處理器的高性能飛控電腦,專為專業無人機、機器人與研究平台設計。
完整支援 ArduPilot 生態系,並針對可靠度與耐用性部署於工業與研究應用而打造。
已廣泛應用於工業、研究與自主平台整合專案。
飛行展示¶
更多飛行畫面¶
主要特色¶
- CNC 鋁合金外殼
- STM32H743 主控(480 MHz)
- 2 MB Flash
- 雙 IMU(ICM42652 + ICM42688)
- 支援外部 I2C 羅盤(RM3100 / IST8310)
- CAN FD(2 埠)
- 雙 GPS 埠
- microSD 紀錄
- 獨立 IOMCU
- 內建 RGB 狀態指示燈
- USB Type-C
- 緊湊封閉式設計
製造與合規¶
於台灣設計與製造。
硬體採用全球性工業級元件採購策略,適合對法規、合規或出口要求嚴格的客戶。
法規認證¶
SparkNavi Blue 已通過國際 FCC/CE/PSE EMC 認證測試。
FCC(美國)¶
- 47 CFR FCC Part 15 Subpart B (Class B)
- ANSI C63.4:2014
CE(歐盟)¶
- EN 55032:2015 + A11:2020
- EN 55035:2017 + A11:2020
- EN IEC 61000-3-2:2019 + A2:2024
- EN 61000-3-3:2013 + A2:2021 + AC:2022
PSE(日本)¶
- J62368-1:2023
以上認證可支援於北美、歐洲與日本市場部署。
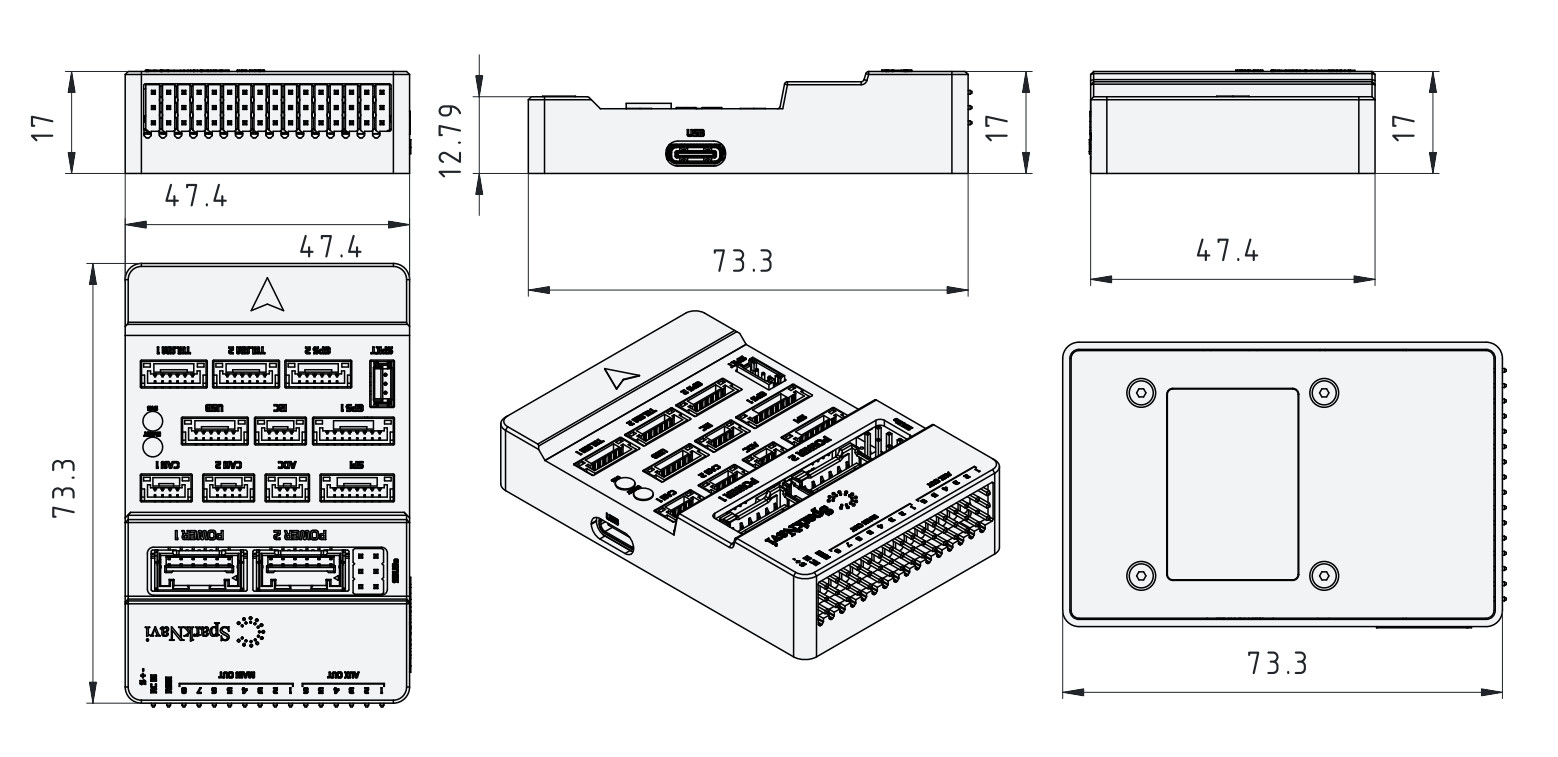
尺寸¶
規格表¶
| 項目 | 規格 |
|---|---|
| MCU | STM32H743 (480 MHz) |
| IOMCU | STM32F103 |
| Flash | 2 MB |
| RAM | 1 MB |
| 參數儲存 | FRAM(非揮發、高耐寫) |
| IMU | ICM42652 + ICM42688 |
| 氣壓計 | BMP280 |
| 內建羅盤 | HMC5883L |
| CAN | 2× CAN FD |
| UARTs(對外) | 5 |
| PWM 輸出 | 14(8 MAIN via IOMCU + 6 AUX via FMU) |
| 紀錄 | microSD |
| USB | USB-C |
主要連接器¶
- POWER1 / POWER2
- GPS1 / GPS2
- TELEM1 / TELEM2
- CAN1 / CAN2
- SPI 擴充埠
- ADC 擴充埠
- I2C 外部匯流排
- SBUS / RSSI 埠
UART 對應¶
| 埠 | 功能 | 硬體流控 |
|---|---|---|
| USART2 | TELEM1 | ✔ CTS / RTS |
| USART3 | TELEM2 | ✔ CTS / RTS |
| USART1 | GPS1 | — |
| UART4 | GPS2 | — |
| UART7 | Debug | — |
| UART8 | IOMCU(內部) | — |
對外可用 UART 共 5 個(USART1 / 2 / 3、UART4、UART7);UART8 為 IOMCU 內部使用,不對外。
I2C 匯流排¶
| 匯流排 | 用途 |
|---|---|
| I2C2 | 外部 I2C |
| I2C4 | 內部感測器 |
外部羅盤可於外部 I2C 匯流排上自動偵測。
連接器配置¶
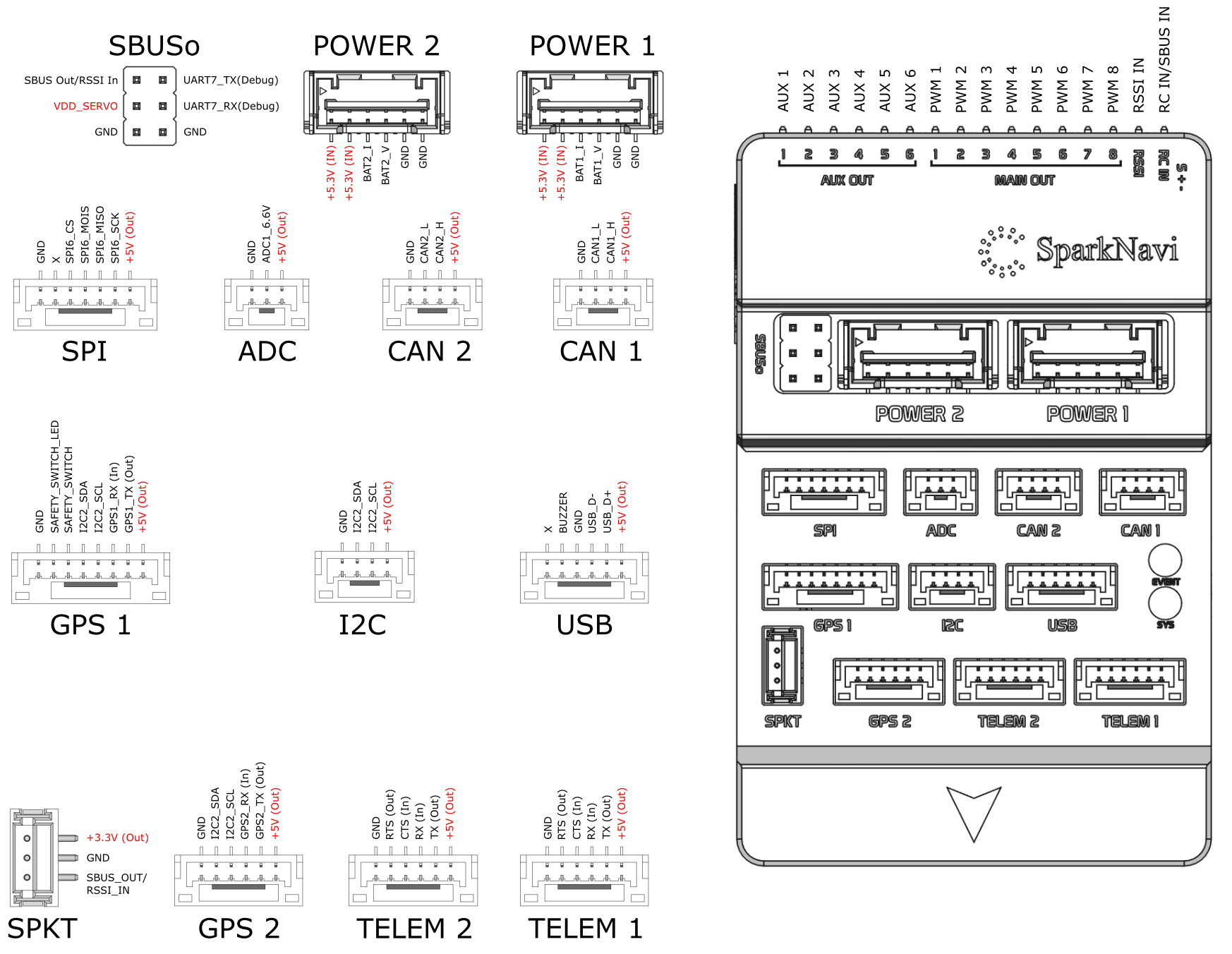
連接器腳位定義¶
TELEM1 / TELEM2(遙測 UART)¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | TX | 輸出 | UART 發送 |
| 3 | RX | 輸入 | UART 接收 |
| 4 | CTS | 輸入 | 流控(可選) |
| 5 | RTS | 輸出 | 流控(可選) |
| 6 | GND | — | 接地 |
GPS1¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | GPS1_TX | 輸出 | UART TX 至 GPS |
| 3 | GPS1_RX | 輸入 | UART RX 自 GPS |
| 4 | I2C2_SCL | 輸出 | 羅盤 I2C 時脈 |
| 5 | I2C2_SDA | 雙向 | 羅盤 I2C 資料 |
| 6 | SAFETY_SWITCH | 輸入 | 安全開關 |
| 7 | SAFETY_SWITCH_LED | 輸出 | 安全開關 / LED |
| 8 | GND | — | 接地 |
GPS2¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | GPS2_TX | 輸出 | UART TX 至 GPS |
| 3 | GPS2_RX | 輸入 | UART RX 自 GPS |
| 4 | I2C2_SCL | 輸出 | 第二 I2C 時脈 |
| 5 | I2C2_SDA | 雙向 | 第二 I2C 資料 |
| 6 | GND | — | 接地 |
CAN1 / CAN2¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | CAN_H | 雙向 | CAN high |
| 3 | CAN_L | 雙向 | CAN low |
| 4 | GND | — | 接地 |
USB 埠¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | USB_D+ | 雙向 | USB 資料正極 |
| 3 | USB_D- | 雙向 | USB 資料負極 |
| 4 | GND | — | 接地 |
| 5 | Buzzer | 輸出 | 外部蜂鳴器輸出 |
| 6 | x | — | x |
此 USB 埠可連接外部安全蜂鳴器,並提供韌體燒錄與 MAVLink 通訊介面。
I2C 外部埠¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | I2C2_SCL | 輸出 | I2C 時脈 |
| 3 | I2C2_SDA | 雙向 | I2C 資料 |
| 4 | GND | — | 接地 |
ADC 埠¶
可接受最高 6.6V 類比輸入(內部分壓,適合一般感測器訊號)。
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | ADC | 輸入 | 類比輸入(最高 6.6V) |
| 3 | GND | — | 接地 |
SPI 擴充埠¶
| Pin | 信號 | 方向 | 說明 |
|---|---|---|---|
| 1 | +5V | 輸出 | 5V 周邊電源 |
| 2 | SPI6_SCK | 輸出 | SPI 時脈 |
| 3 | SPI6_MISO | 輸入 | SPI MISO |
| 4 | SPI6_MOSI | 輸出 | SPI MOSI |
| 5 | SPI6_CS | 輸出 | 晶片選擇 |
| 6 | x | — | x |
| 7 | GND | — | 接地 |
SBUS / RSSI 埠(SPKT)¶
| Pin | 信號 |
|---|---|
| 1 | +3.3V |
| 2 | GND |
| 3 | SBUS_OUT / RSSI_IN |
POWER1 / POWER2¶
| Pin | 信號 |
|---|---|
| 1 | +5.3V (IN) |
| 2 | +5.3V (IN) |
| 3 | BAT1_I |
| 4 | BAT1_V |
| 5 | GND |
| 6 | GND |
輸出架構¶
SparkNavi Blue 採用雙處理器架構:
- MAIN 輸出 由 IOMCU 驅動(支援硬體 failsafe)
- AUX 輸出 由 FMU 直接驅動(高速 / 高彈性)
此架構提供冗餘設計與更佳的飛行安全性。
MAIN 輸出(由 IOMCU 控制)¶
主要馬達輸出,具備硬體 failsafe 支援。
| 輸出 | 功能 | 備註 |
|---|---|---|
| MAIN OUT 1 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 2 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 3 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 4 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 5 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 6 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 7 | 馬達 / 伺服 | IOMCU 控制 |
| MAIN OUT 8 | 馬達 / 伺服 | IOMCU 控制 |
✔ 支援硬體 failsafe ✔ 建議用於馬達 / 關鍵致動器
AUX 輸出(由 FMU 控制)¶
提供給酬載與進階周邊的彈性輸出。AUX OUT 1–6 均支援 Bi-Directional DShot(可從 ESC 讀回 RPM telemetry,適合進階 ESC 動態調參與震動分析)。
| 輸出 | 典型用途 |
|---|---|
| AUX OUT 1 | 雲台 / 酬載 |
| AUX OUT 2 | 雲台 / 酬載 |
| AUX OUT 3 | 起降架 |
| AUX OUT 4 | 相機觸發 |
| AUX OUT 5 | 燈具 / 蜂鳴器 |
| AUX OUT 6 | 自訂周邊 |
✔ 支援高更新率 ✔ 支援 PWM、DShot、Bi-Directional DShot ✔ 完整支援 ArduPilot 客製化設定
PWM 摘要¶
MAIN 輸出由 IOMCU 驅動。 AUX 輸出由 FMU 驅動。
| 輸出 | 腳位 |
|---|---|
| MAIN OUT | 1–8 |
| AUX OUT | 1–6 |
| 總計 | 14 PWM 輸出 |
輸出分組規則¶
由於硬體計時器共用,同一群組內所有輸出必須使用相同的輸出速率;若群組內任一通道使用 DShot,該群組所有通道都必須使用 DShot。
MAIN OUT(8 個輸出 / 3 個群組)
| 群組 | 通道 |
|---|---|
| Group 1 | MAIN OUT 1, 2 |
| Group 2 | MAIN OUT 3, 4 |
| Group 3 | MAIN OUT 5, 6, 7, 8 |
AUX OUT(6 個輸出 / 3 個群組)
| 群組 | 通道 |
|---|---|
| Group 1 | AUX OUT 1, 2, 3, 4 |
| Group 2 | AUX OUT 5 |
| Group 3 | AUX OUT 6 |
此分組規則影響 ESC 配線決定:若混用 PWM 與 DShot,需將不同協定的 ESC 接在不同群組。
RC 輸入¶
SBUS 連接器支援:
- SBUS 輸入
- SBUS 輸出
- RSSI 輸入
電源供應¶
可透過 POWER1 或 POWER2 之任一埠供電。
兩埠皆提供:
- 電源輸入
- 電壓 / 電流偵測
- 冗餘供電能力
預設電池監測參數¶
搭配 SparkNavi 電源模組時,ArduPilot 韌體已內建以下校準參數,連接即可正常讀取電壓 / 電流:
| 參數 | POWER1(BATT) | POWER2(BATT2) |
|---|---|---|
BATT_MONITOR |
4 |
4 |
BATT_VOLT_PIN |
16 |
14 |
BATT_CURR_PIN |
17 |
15 |
BATT_VOLT_MULT |
16.76 |
16.76 |
BATT_AMP_PERVLT |
100 |
100 |
Note
上述校準值針對 SparkNavi 電源模組;若搭配其他廠牌電源模組,需依模組規格調整 BATT_VOLT_MULT 與 BATT_AMP_PERVLT。
羅盤¶
板載內建 HMC5883L 羅盤(Honeywell,美國品牌),選用此型號是為了符合 NDAA 排紅供應鏈 需求 —— HMC5883L 是 ArduPilot 原生支援、來源非中國半導體廠的少數磁力計選項之一,適用於對供應鏈合規有嚴格要求的國防與工業客戶。
實務上,如同其他飛控板,仍建議搭配外部羅盤 —— 任何飛控板內建的磁力計鄰近電源電路時都會受電流變化造成磁干擾;外部羅盤透過 I2C 拉遠至遠離電源線的位置安裝,可獲得明顯更乾淨的磁場讀值。此為飛控通用實務,不限於本產品。
推薦外部羅盤型號(均符合 NDAA 供應鏈)¶
- RM3100(PNI Sensor Corporation,美國)—— 高精度磁阻型,推薦用於高干擾環境
- IST8310(iSentek,台灣)—— ArduPilot 自動偵測,台灣設計
外部羅盤可於外部 I2C 匯流排自動偵測,並支援 ArduPilot 的自動方向校正功能。
韌體支援¶
完整支援於 ArduPilot 官方韌體版本。
| 項目 | 內容 |
|---|---|
| 板卡名稱 | SparkNavi Blue |
| ArduPilot Target | sparknavi-blue |
| APJ Board ID | 1362 |
| 韌體下載 | ArduPilot Firmware Server |
SparkNavi Blue 出廠已預先燒錄 ArduPilot bootloader,可直接透過 Mission Planner、QGroundControl 等地面站軟體上傳 .apj 韌體檔,無需額外的 ST-Link 或 DFU 工具。
已支援韌體¶
- ArduPilot(官方支援,Copter / Plane / Rover / Sub 系列)
典型接線¶
典型接線範例:
- GPS 接於 GPS1
- 遙測模組接於 TELEM1
- 外部羅盤接於 I2C
- ESC 接於 MAIN 輸出
典型應用¶
- 工業無人機平台
- VTOL 與多旋翼系統
- 自主機器人
- 研究與開發平台
電氣規格¶
| 參數 | 數值 |
|---|---|
| 工作電壓 | 4.8V – 6.0V |
| 建議電源模組 | 5.3V 穩壓供應 |
| 典型功耗 | 0.98W |
| 邏輯電壓 | 3.3V |
| GPS 電源輸出 | 5V |
| 周邊電源輸出 | 5V |
電源由 POWER1 或 POWER2 模組供應,具備冗餘能力。
實際功耗依連接周邊而異。
環境規格¶
| 參數 | 數值 |
|---|---|
| 工作溫度 | -20°C 至 +70°C |
| 儲存溫度 | -40°C 至 +85°C |
機械規格¶
| 參數 | 數值 |
|---|---|
| 長 | 73.3 mm |
| 寬 | 47.4 mm |
| 高 | 17 mm |
| 重量 | 70 g |
製造商¶
SparkNavi 台灣設計與製造
下載資源¶
整合支援或量產訂單,歡迎與我們聯繫。
工程與認證文件可由下方下載。
機械與工程文件¶
- 📦 3D STEP 模型
- 📄 產品技術規格書
認證文件¶
- 📄 FCC SDoC(美國)
- 📄 CE EMC(歐盟)
- 📄 PSE(日本)