MTF-01 光流設定¶
MicoAir MTF-01 是一款整合光流 + 雷射測距的模組,可讓無人機在 GPS 訊號弱的環境(室內、橋下、樹冠下)維持位置鎖定。本指南涵蓋與 SparkNavi Blue 的整合設定。
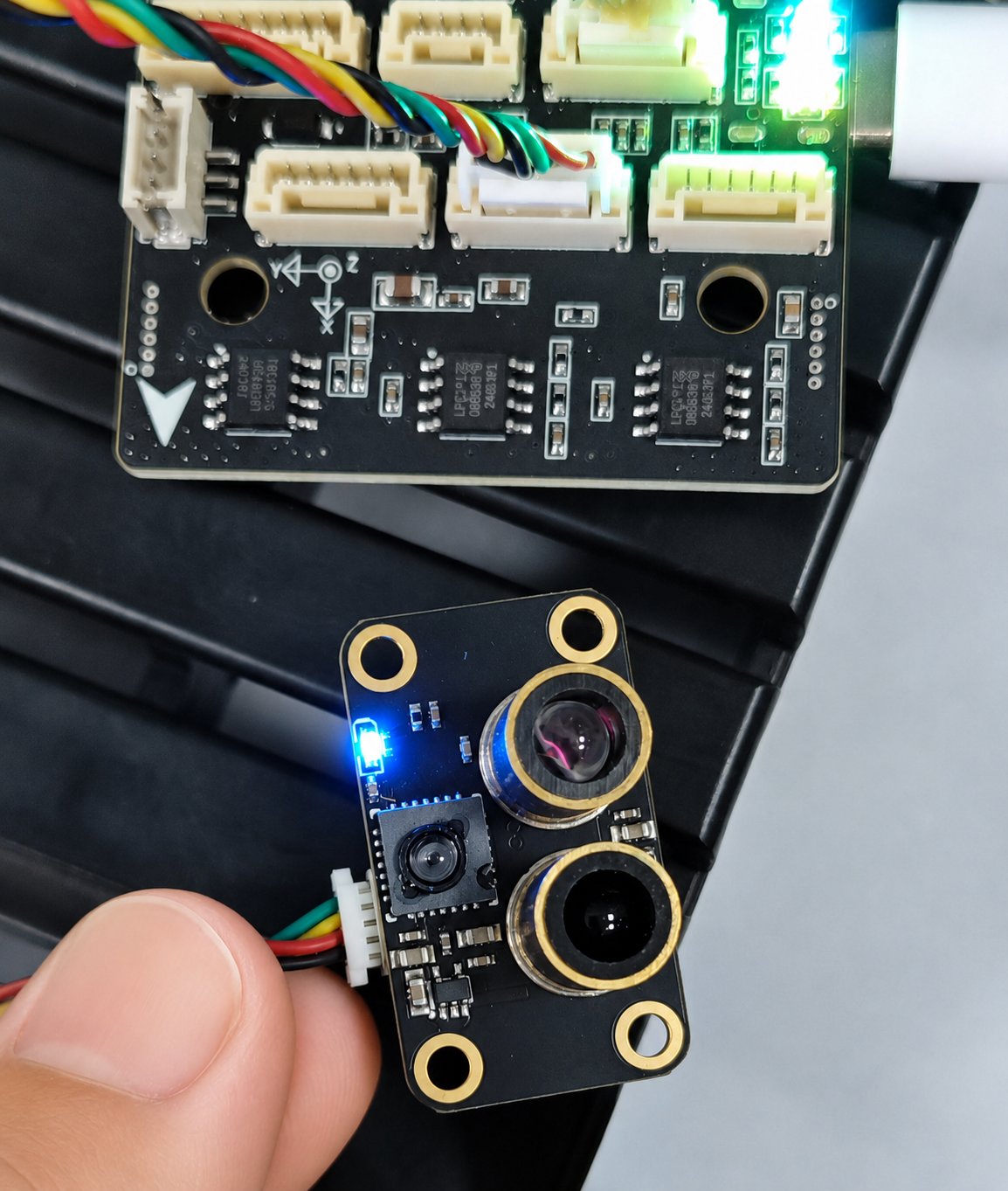
硬體接線¶
將 MTF-01 接於 SparkNavi Blue 的 TELEM2 連接器(UART 通訊)。
TELEM2 連接器腳位:
| Pin | 信號 | 說明 |
|---|---|---|
| 1 | +5V | 5V 周邊電源 |
| 2 | TX | UART 發送(對應 MTF-01 RX) |
| 3 | RX | UART 接收(對應 MTF-01 TX) |
| 4 | CTS | 流控(本應用不使用) |
| 5 | RTS | 流控(本應用不使用) |
| 6 | GND | 接地 |
微空助手(micoAssistant)前置設定¶
⚠️ 重要前置步驟:使用 ArduPilot 韌體 4.5.0 以上版本時,如果直接使用預設 MAV_ID,ArduPilot 可能無法識別 MTF-01。
需先用 micoAssistant 連接 MTF-01,進行以下調整:
1. 確認通訊協議¶
進入 RangeSensor 設定視窗,將 通信協議 設為 Mav_APM(若使用 PX4 則改為 PX4)。

2. 修改 MAV_ID¶
把 MAV_ID(畫面上的 Sys id)改為 200(任何非預設值的 1 都可以,常用 200)。
3. 確認其他設定¶
| 設定項 | 數值 | 說明 |
|---|---|---|
| 通信協議 | Mav_APM |
ArduPilot 韌體 |
| 光流方向 | 0° |
安裝方向(視實際安裝旋轉設定) |
| TOF_ID | 0 |
測距 ID |
| 測距頻率 | 100Hz |
雷射測距更新率 |
| RNG_ORIENT | DOWN |
朝下 |
| 接口類型 | UART |
串口模式 |
| 光流縮放 | 100 |
光流增益,依機體大小調整 |
| Sys id | 200 |
MAV_ID(非預設值) |
按下 修改設定 寫入 MTF-01。
ArduPilot 端 SERIAL2 設定¶
於 Mission Planner Config → Full Parameter List 設定:
| 參數 | 數值 | 說明 |
|---|---|---|
SERIAL2_PROTOCOL |
1 (MAVLink1) |
TELEM2 協定 |
SERIAL2_BAUD |
115 (115200) |
TELEM2 鮑率 |
SERIAL2_OPTIONS |
0 |
新版 ArduPilot 4.6.3+ 維持預設 0 即可;舊版可能需設 1024(Don't forward MAVLink to/from) |
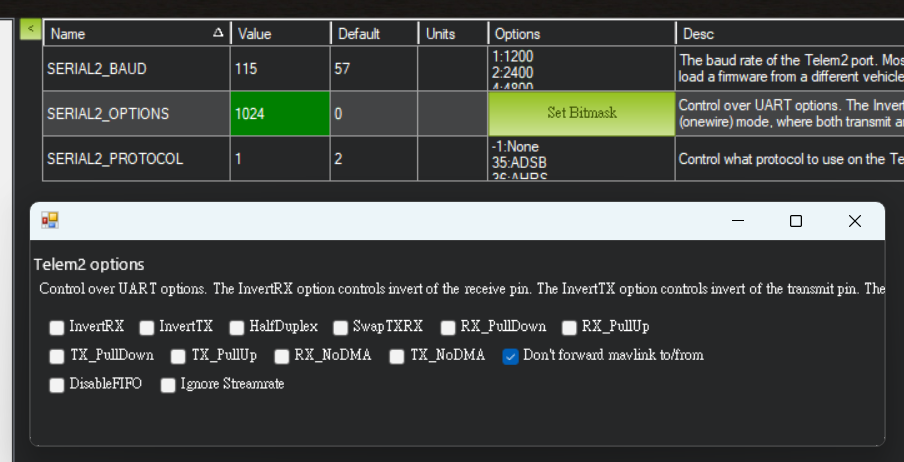
⚠️ 版本注意:
- ArduPilot 4.6.3 以上:SERIAL2_OPTIONS 維持預設 0
- ArduPilot 4.5.x – 4.6.2:SERIAL2_OPTIONS 可能需設 1024(勾選 "Don't forward mavlink to/from")
距離感測器(RNGFND1)設定¶
重啟飛控後,以下參數才會出現:
| 參數 | 數值 | 說明 |
|---|---|---|
RNGFND1_TYPE |
10 (MAVLink) |
雷射測距型態 |
RNGFND1_ORIENT |
25 (Downward) |
朝下安裝 |
RNGFND1_MIN_CM |
5 |
最小有效距離(cm) |
RNGFND1_MAX_CM |
1200 |
最大有效距離(cm) |
RNGFND1_ORIENT 數值對應官方文件中的 25(Downward)。
光流(OPTFLOW)設定¶
| 參數 | 數值 | 說明 |
|---|---|---|
FLOW_TYPE |
5 (PX4Flow) |
光流型態(MAVLink 通訊) |
FLOW_FXSCALER |
0 |
X 軸增益縮放(從 0 開始,依實際飛行調整) |
FLOW_FYSCALER |
0 |
Y 軸增益縮放 |
FLOW_ORIENT_YAW |
0 |
光流安裝方向(度) |
驗證¶
設定完成並重啟飛控後,於 Mission Planner Status 頁面應該能看到:
- sonarrange:雷射測距即時數值(隨高度變化)
- flow_x / flow_y:光流速度
地面上拿著飛控移動,flow_x、flow_y 應有對應數值變化;將飛控離地高度改變,sonarrange 應有對應變化。