STORM32 雲台設定¶
STORM32BGC 是常見的開源三軸雲台控制器。本指南涵蓋與 SparkNavi Blue 飛控的接線與 ArduPilot 端參數設定。
硬體規格與供電¶
- 電壓:STORM32主板輸入電壓範圍是10V~16.8V,建議用3D電池。
- 電流:0.5A(僅雲台控制電路,馬達另計)
- GUI 軟體:STORM32 BGC Tool v0.90(較舊但穩定的版本)
⚠️ 請使用 V0.90 GUI 進行調參,部分新版 GUI 對舊韌體相容性問題較多。
接線對應¶
| 雲台軸 | SparkNavi Blue 接腳 | ArduPilot 參數 | 對應 RC 通道 |
|---|---|---|---|
| PITCH | AUX1 | SERVO9_FUNCTION |
RCIN9 |
| ROLL | AUX2 | SERVO10_FUNCTION |
RCIN10 |
| YAW | AUX3 | SERVO11_FUNCTION |
RCIN11 |
| 鎖頭/跟隨 | AUX4 | SERVO12_FUNCTION |
RCIN6 |
「鎖頭」(Lock Mode)是把雲台 yaw 軸鎖在某個方向(例如正前方);開啟後,無人機怎麼旋轉,鏡頭都會朝向當時鎖住的方向。大部份正常的應用情境都是採用鎖頭模式。
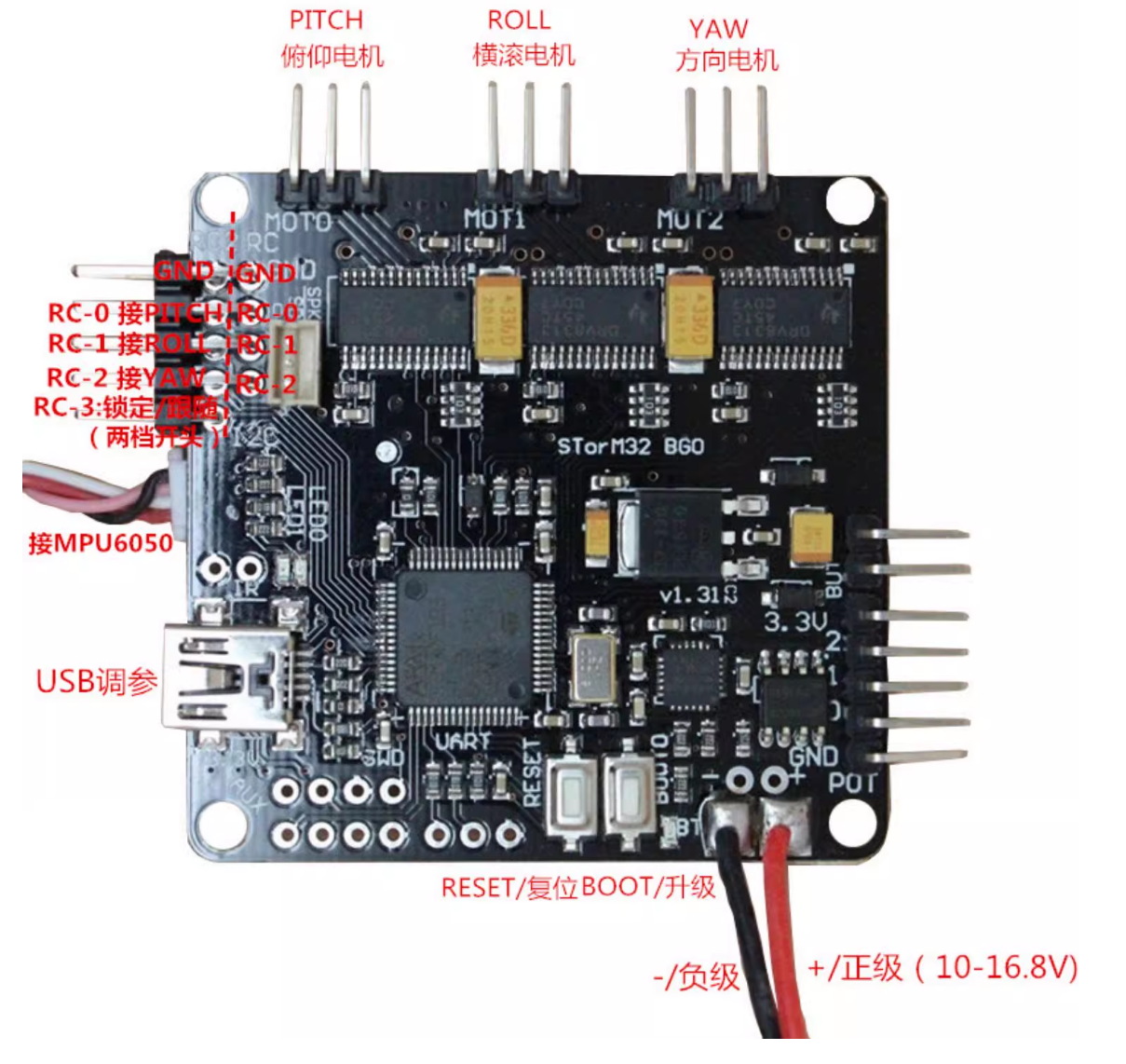
STORM32 板接線參考¶
下圖為 STORM32 BGC 板的接線標示,RC-0 / RC-1 / RC-2 對應 PITCH / ROLL / YAW 訊號輸入,USB 用於調參。
STORM32 GUI 調參¶
連接 STORM32 BGC 與電腦(透過 mini USB),開啟 STORM32 BGC Tool v0.90:
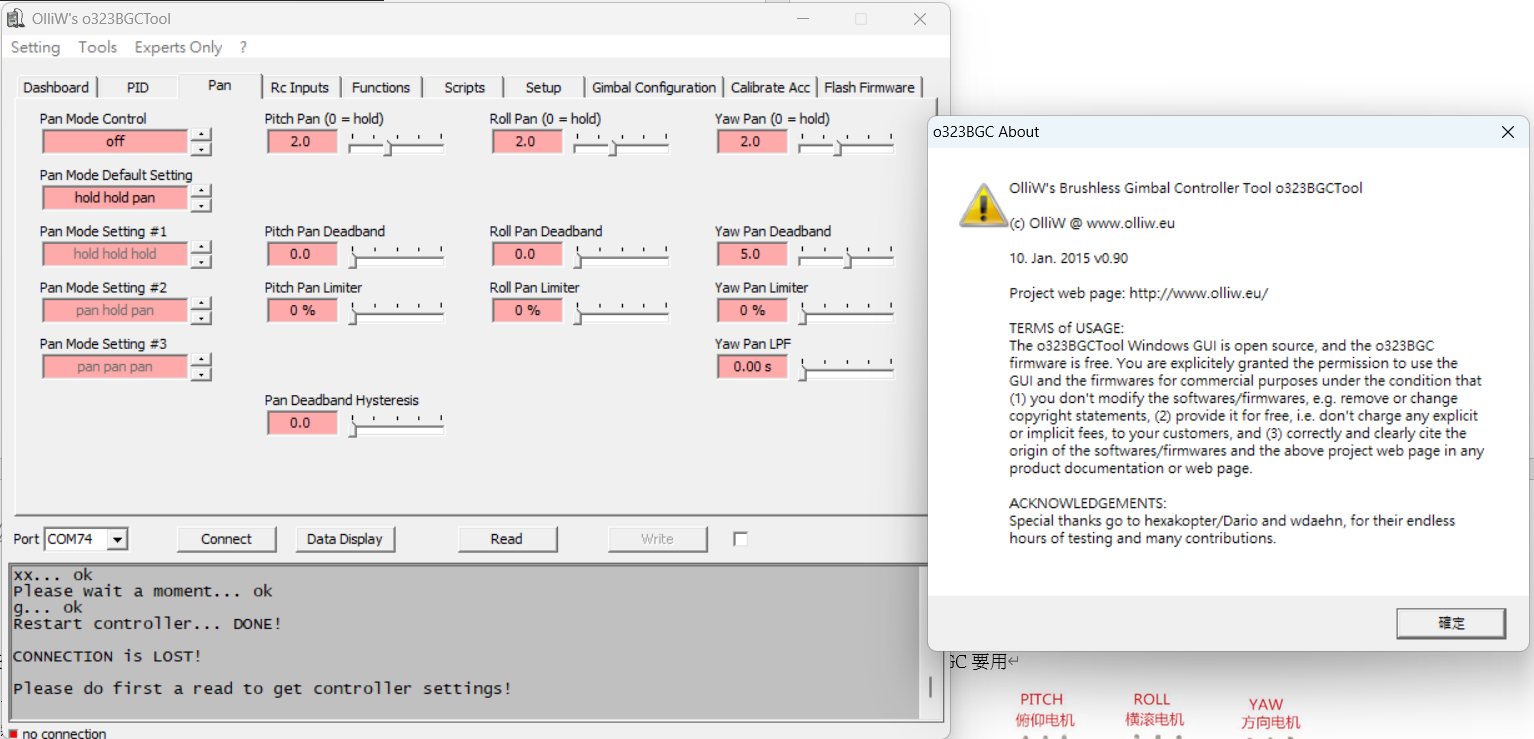
主要調整 PID(穩定控制)與 Pan(自動跟隨)頁面參數,依雲台機型不同需個別調校。 當PID越硬,Gimbal抗風能力越好,但馬達發熱相當快
ArduPilot 端設定步驟¶
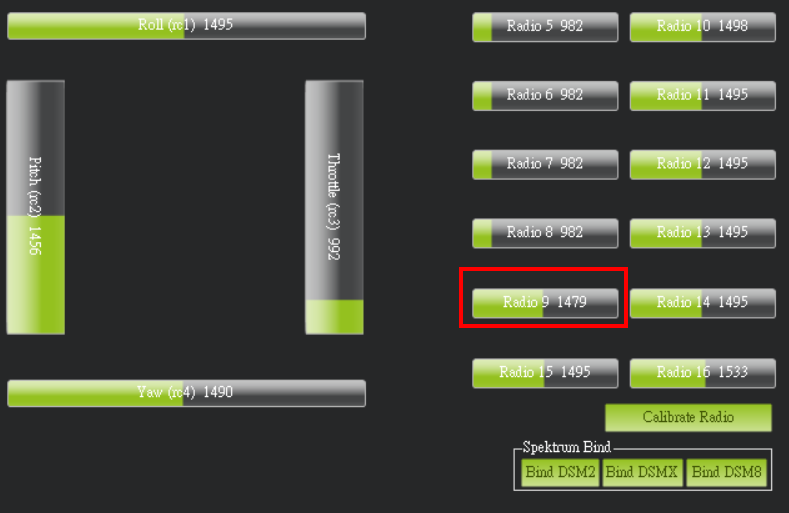
1. 確認 RC 通道訊號¶
於 Mission Planner 的 Setup → Mandatory Hardware → Radio Calibration 頁面,確認 Radio 9 / Radio 10 / Radio 11 等通道有對應的訊號變化(撥動遙控器對應旋鈕)。
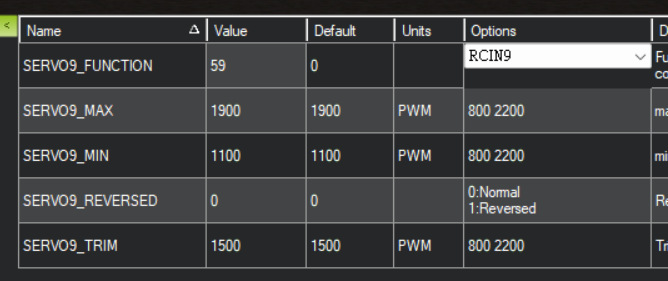
2. 設定 SERVO 函數¶
於 Config → Full Parameter List 設定:
| 參數 | 數值 | 說明 |
|---|---|---|
SERVO9_FUNCTION |
59 (RCIN9) |
PITCH 直通 RC 9 |
SERVO10_FUNCTION |
60 (RCIN10) |
ROLL 直通 RC 10 |
SERVO11_FUNCTION |
61 (RCIN11) |
YAW 直通 RC 11 |
SERVO12_FUNCTION |
56 (RCIN6) |
鎖頭(由 RC6 開關控制) |
亦可同步調整 PWM 範圍:
| 參數 | 預設 | 說明 |
|---|---|---|
SERVO9_MIN |
1100 |
PWM 最小值 |
SERVO9_MAX |
1900 |
PWM 最大值 |
SERVO9_TRIM |
1500 |
PWM 中位 |
SERVO9_REVERSED |
0 或 1 |
反向控制 |
其他 SERVO10–SERVO12 設定方式相同。
鎖頭功能使用¶
設定完成後,撥動遙控器上對應 RC6 的開關(通常是兩段式開關):
- OFF:雲台跟隨機體姿態
- ON:雲台 YAW 鎖定當時方向,機體旋轉時鏡頭保持朝原方向